

ROS 2 Topics & rqt_graph
Be brave enough to start a conversation that matters. – Margaret Wheatley

Photo by Christina @ wocintechchat.com on Unsplash
Introduction
In the previous post, I discussed Robot Operating System 2 Nodes. This post expands upon that one and discusses ROS 2 topics.
ROS Topics
A tutorial at ros.org on this topic (no pun intended) is here. ROS 2 communicates via a system of publisher and subscriber Nodes as in this figure:

A node may publish data to any number of topics and simultaneously have subscriptions to any number of topics. Image credit: ros.org
That said, topics don’t have to only be point-to-point communications; they can be one-to-many or many-to-many as well. The tutorial walks you through starting up turtlesim and rqt_graph. My graph looks like this:

My ros_graph of my turtle in turtlesim
When you are in rqt_graph you can hover the mouse over any area in the window to get more info on the area under the mouse. As documented:
The graph is depicting how the
/turtlesimnode and the/teleop_turtlenode are communicating with each other over a topic. The/teleop_turtlenode is publishing data (the keystrokes you enter to move the turtle around) to the/turtle1/cmd_veltopic, and the/turtlesimnode is subscribed to that topic to receive the data
You can get a more detailed view by unchecking all of the hide boxes:
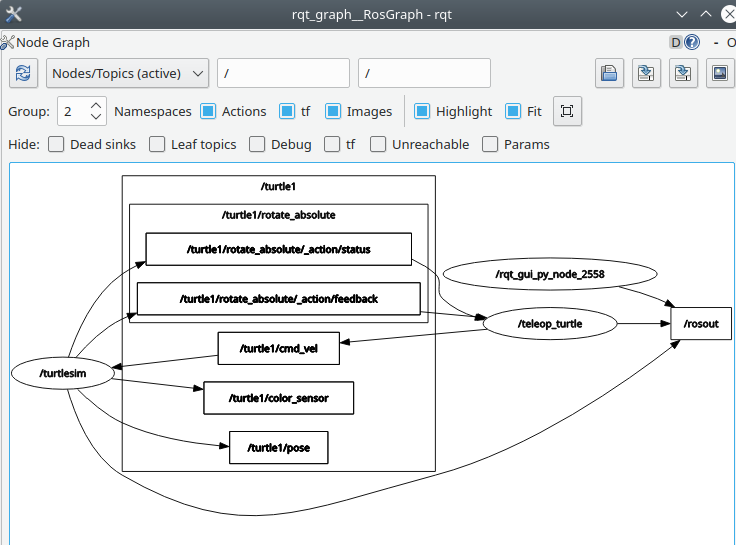
More detailed view of my teleoperated turtle.
Operations on Topics
The tutorial covers various command line operations on topics such as list, echo, info, and rates. You can also show the types of messages flowing over your topics with ros2 interface show. For example:

ROS Geometry Twist message
You can also publish out messages via the “ros2 topic pub” command line call or query the rate messages are being sent with “ros2 topic hz.” Examples are available in the tutorial. Optionally, you may also parameterize ROS 2.
Other Message Passing Mechanisms
Another way ROS 2 can pass messages is with service calls, covered here. The main gotcha with service calls is they are not guaranteed to respond to a request, especially over wireless networks and particularly not when nodes are over the horizon. Be especially careful when defining callbacks. As an alternative to services, another communication method available in ROS 2 are actions, documented here.